Home /
Expert Answers /
Mechanical Engineering /
1-derive-the-dynamic-balance-equations-and-write-down-the-simultaneous-constraint-matrix-for-the-fo-pa641
(Solved): 1. Derive the dynamic balance equations and write down the simultaneous constraint matrix for the fo ...
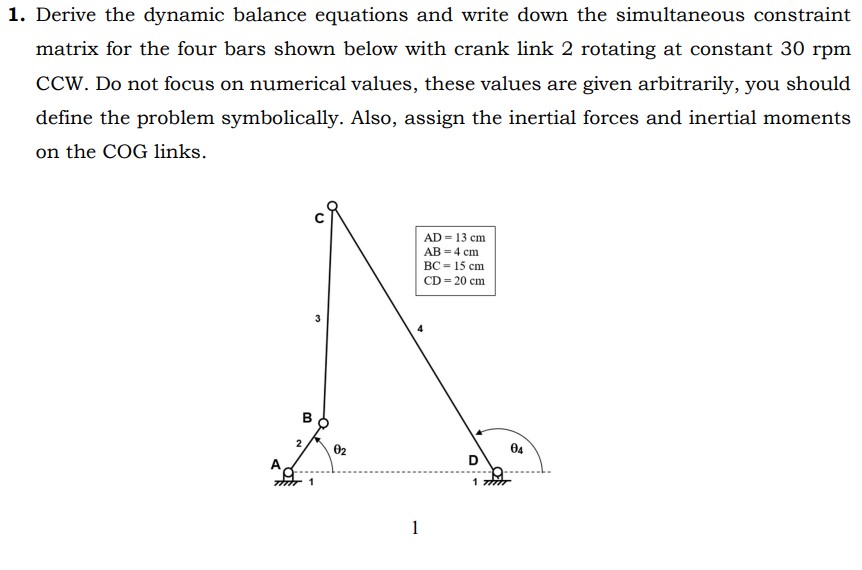
1. Derive the dynamic balance equations and write down the simultaneous constraint matrix for the four bars shown below with crank link 2 rotating at constant 30 rpm CCW. Do not focus on numerical values, these values are given arbitrarily, you should define the problem symbolically. Also, assign the inertial forces and inertial moments on the COG links.