Home /
Expert Answers /
Economics /
3-consider-a-duopoly-candy-industry-nutty-fudge-and-sweet-39-n-sour-each-firm-must-decide-how-much-pa776
(Solved): 3. Consider a duopoly candy industry: Nutty Fudge and Sweet 'n Sour. Each firm must decide how much ...
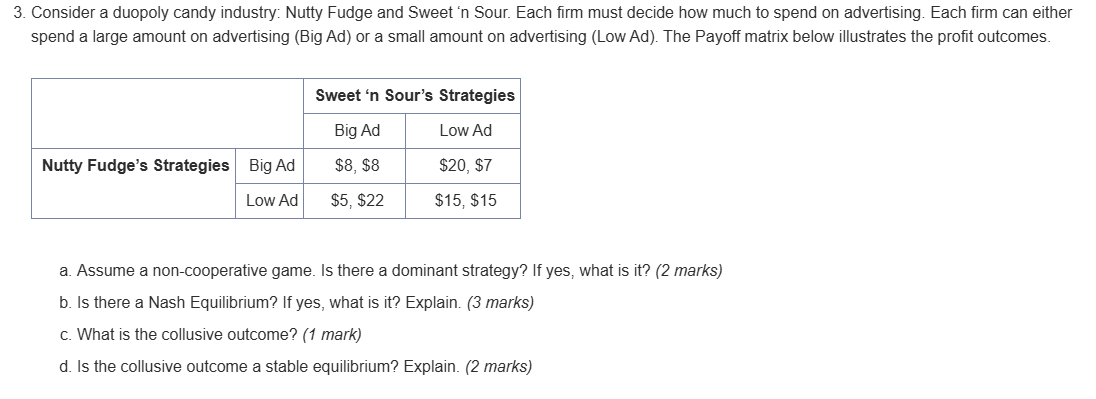
3. Consider a duopoly candy industry: Nutty Fudge and Sweet 'n Sour. Each firm must decide how much to spend on advertising. Each firm can either spend a large amount on advertising (Big Ad) or a small amount on advertising (Low Ad). The Payoff matrix below illustrates the profit outcomes. a. Assume a non-cooperative game. Is there a dominant strategy? If yes, what is it? (2 marks) b. Is there a Nash Equilibrium? If yes, what is it? Explain. (3 marks) c. What is the collusive outcome? (1 mark) d. Is the collusive outcome a stable equilibrium? Explain. (2 marks)