Home /
Expert Answers /
Mechanical Engineering /
5-24-spherical-coordinates-position-and-oriontation-section-6-1-the-following-figure-shows-a-b-pa986
(Solved): 5.24 Spherical coordinates, position, and oriontation. (Section 6.1). The following figure shows a b ...
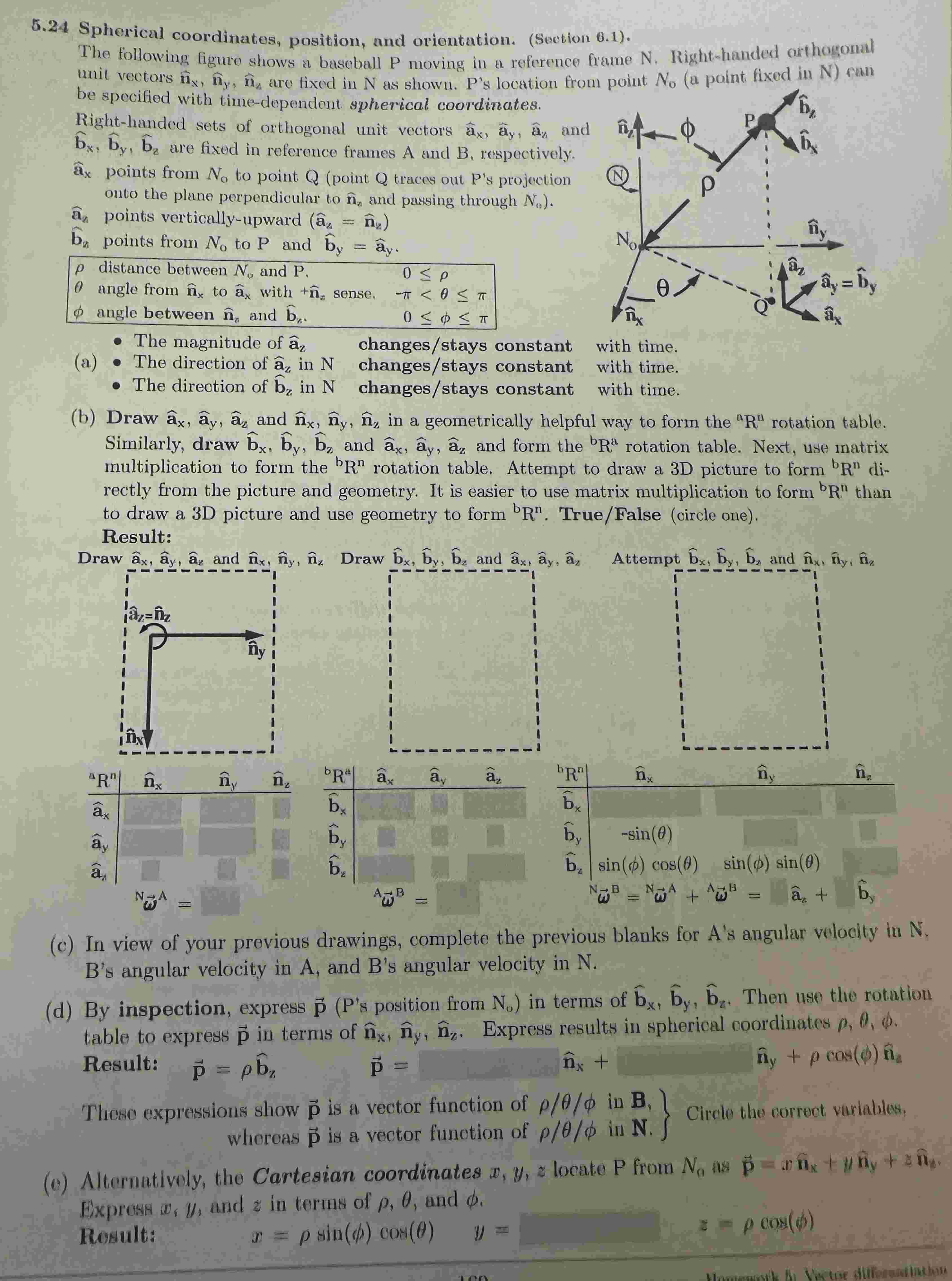
5.24 Spherical coordinates, position, and oriontation. (Section 6.1).
The following figure shows a baseball P moving in a reference frame N . Right-handed orthogonal
unit vectors widehat(n)_(x),widehat(n)_(y),widehat(n)_(\Delta ) are fixed in N as shown. P's location from point N_(0) (a point fixed in N ) can
be specified with time-dependent spherical coordinates.
Right-handed sets of orthogonal unit vectors widehat(a)_(x),widehat(a)_(y),widehat(a)_(z) and
widehat(b)_(x),widehat(b)_(y),widehat(b)_(z) are fixed in reference frames A and B , respectively.
widehat(a)_(x) points from N_(o)widehat(n)_(2) and passing through N_(9) widehat(a)_(2)widehat(a)_(2)=widehat(n)_(2) widehat(b)_(2) points from N_(0) to P and widehat(b)_(y)=widehat(a)_(y).
The magnitude of widehat(a)_(2), change(s)/(s)tays constant
(a) - The direction of widehat(a)_(z) in N
change(s)/(s)tays constant
with time.
The direction of widehat(b)_(z) in N
change(s)/(s)tays constant
with time.
with time.
(b) Draw widehat(a)_(x),widehat(a)_(y),widehat(a)_(z) and widehat(n)_(x),widehat(n)_(y),widehat(n)_(z) in a geometrically helpful way to form the ^(a)R^(u) rotation table.
Similarly, draw widehat(b)_(x),widehat(b)_(y),widehat(b)_(z) and widehat(a)_(x),widehat(a)_(y),widehat(a)_(z) and form the ^(b)R^(a) rotation table. Next, use matrix
multiplication to form the ^(b)R^(n) rotation table. Attempt to draw a 3D picture to form ^(b)R^(n) di-
rectly from the picture and geometry. It is easier to use matrix multiplication to form ^(b)R^(n) than
to draw a 3D picture and use geometry to form ^(b)R^(n). Tru(e)/(F)alse (circle one).
Result:
Draw hat(a)_(x),hat(a)_(y),hat(a)_(z) and hat(n)_(x),hat(n)_(y),hat(n)_(z) Draw hat(b)_(x),hat(b)_(y),hat(b)_(z) and hat(a)_(x),hat(a)_(y),hat(a)_(z) Attempt hat(b)_(x),hat(b)_(y),hat(b)_(z) and hat(n)_(x),hat(n)_(y),hat(n)_(z)
^(N)vec(\omega )^(A)=
^(A)vec(\omega )^()