(Solved): A control system will be designed for a robot arm. An electric motor inside the joint rotates the ar ...
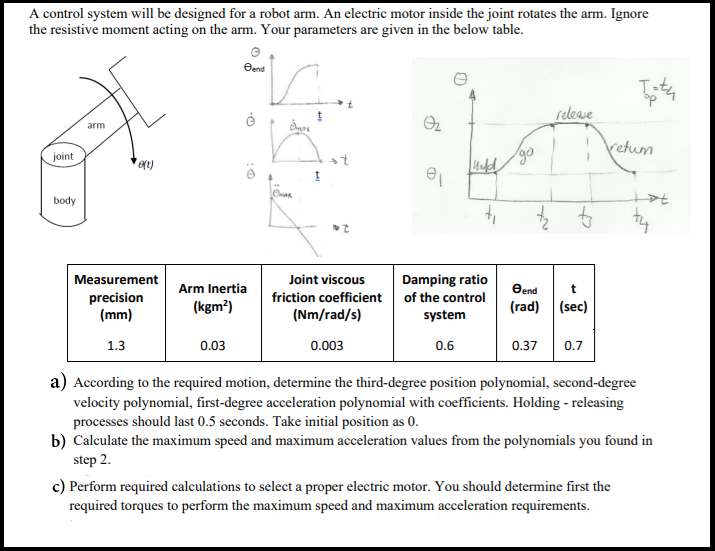
A control system will be designed for a robot arm. An electric motor inside the joint rotates the arm. Ignore the resistive moment acting on the arm. Your parameters are given in the below table.Measurement precision (mm)Arm Inertia ( \( \mathrm{kgm}^{2} \) )Joint viscous friction coefficient ( \( \mathrm{Nm} / \mathrm{rad} / \mathrm{s} \) )Damping ratio of the control system\( \boldsymbol{\Theta}_{\text {end }} \) (rad)t (sec) a) According to the required motion, determine the third-degree position polynomial, second-degree velocity polynomial, first-degree acceleration polynomial with coefficients. Holding - releasing processes should last 0.5 seconds. Take initial position as 0 . b) Calculate the maximum speed and maximum acceleration values from the polynomials you found in step 2. c) Perform required calculations to select a proper electric motor. You should determine first the required torques to perform the maximum speed and maximum acceleration requirements.