Home /
Expert Answers /
Electrical Engineering /
a-rotational-mechanical-system-is-shown-in-figure-q2c-below-i-present-the-state-space-equations-pa187
(Solved): A rotational mechanical system is shown in Figure Q2c below: (i) Present the state-space equations ...
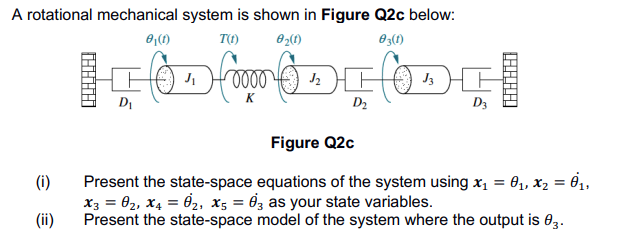
A rotational mechanical system is shown in Figure Q2c below: (i) Present the state-space equations of the system using
x_(1)=\theta _(1),x_(2)=\theta _(1)^(?),
x_(3)=\theta _(2),x_(4)=\theta _(2)^(?),x_(5)=\theta _(3)^(?)as your state variables. (ii) Present the state-space model of the system where the output is
\theta _(3).