Home /
Expert Answers /
Electrical Engineering /
b-the-differential-equation-of-a-robotic-arm-system-is-given-below-where-y-t-is-the-arm-position-pa495
(Solved): b) The differential equation of a robotic arm system is given below, where y(t) is the arm position, ...
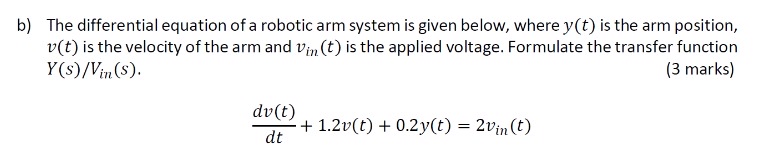
b) The differential equation of a robotic arm system is given below, where
y(t)is the arm position,
v(t)is the velocity of the arm and
v_(in)(t)is the applied voltage. Formulate the transfer function
Y(s)/(V_(in))(s). (3 marks)
(dv(t))/(dt)+1.2v(t)+0.2y(t)=2v_(in)(t)