Home /
Expert Answers /
Electrical Engineering /
consider-the-control-system-shown-in-figure-3-where-the-feedback-controller-is-a-positive-proport-pa512
(Solved): Consider the control system shown in Figure 3, where the feedback controller is a positive proport ...
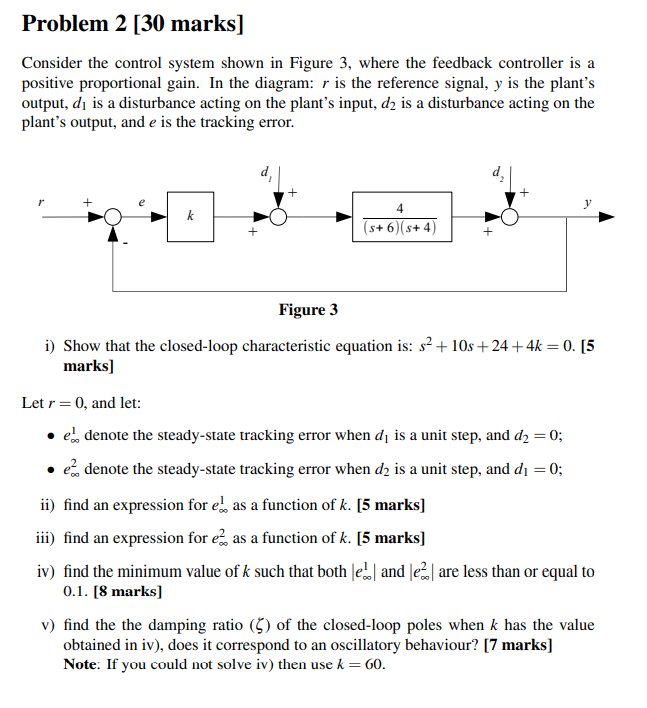
Consider the control system shown in Figure 3, where the feedback controller is a positive proportional gain. In the diagram: \( r \) is the reference signal, \( y \) is the plant's output, \( d_{1} \) is a disturbance acting on the plant's input, \( d_{2} \) is a disturbance acting on the plant's output, and \( e \) is the tracking error. i) Show that the closed-loop characteristic equation is: \( s^{2}+10 s+24+4 k=0 \). [5 marks] Let \( r=0 \), and let: - \( e_{\infty}^{1} \) denote the steady-state tracking error when \( d_{1} \) is a unit step, and \( d_{2}=0 \); - \( e_{\infty}^{2} \) denote the steady-state tracking error when \( d_{2} \) is a unit step, and \( d_{1}=0 \); ii) find an expression for \( e_{\infty}^{1} \) as a function of \( k . \) [5 marks] iii) find an expression for \( e_{\infty}^{2} \) as a function of \( k \). [5 marks] iv) find the minimum value of \( k \) such that both \( \left|e_{\infty}^{1}\right| \) and \( \left|e_{\infty}^{2}\right| \) are less than or equal to 0.1. [8 marks] v) find the the damping ratio \( (\zeta) \) of the closed-loop poles when \( k \) has the value obtained in iv), does it correspond to an oscillatory behaviour? [7 marks] Note: If you could not solve iv) then use \( k=60 \).
Expert Answer
For the given problem, a step-by-step explanation is given below to find the charac