Home /
Expert Answers /
Mechanical Engineering /
consider-the-manipulator-shown-in-figure-3-the-robot-39-s-current-configuration-is-given-by-l-1-in-pa440
(Solved): Consider the manipulator shown in Figure-3. The robot's current configuration is given by l_(1) (in ...
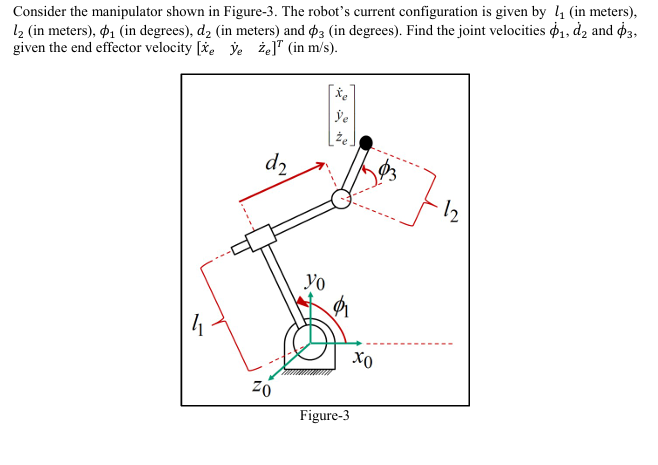
Consider the manipulator shown in Figure-3. The robot's current configuration is given by l_(1) (in meters), l_(2) (in meters), \phi _(1) (in degrees), d_(2) (in meters) and \phi _(3) (in degrees). Find the joint velocities \phi _(1)^(?),d_(2)^(?) and \phi _(3)^(?), given the end effector velocity [[x_(e)^(?),y_(e)^(?),z_(e)^(?)]]^(T)(in(m)/(s)).
can you solve this question with clear steps and parametricly