Home /
Expert Answers /
Advanced Math /
consider-the-system-given-by-x-1-x-2-0-1-6-3-x-1-x-2-0-7-pa275
(Solved): Consider the system given by [[x_(1)^()],[x_(2)^()]]=[[0,1],[-6,-3]][[x_(1)],[x_(2)]]+[[0],[7] ...
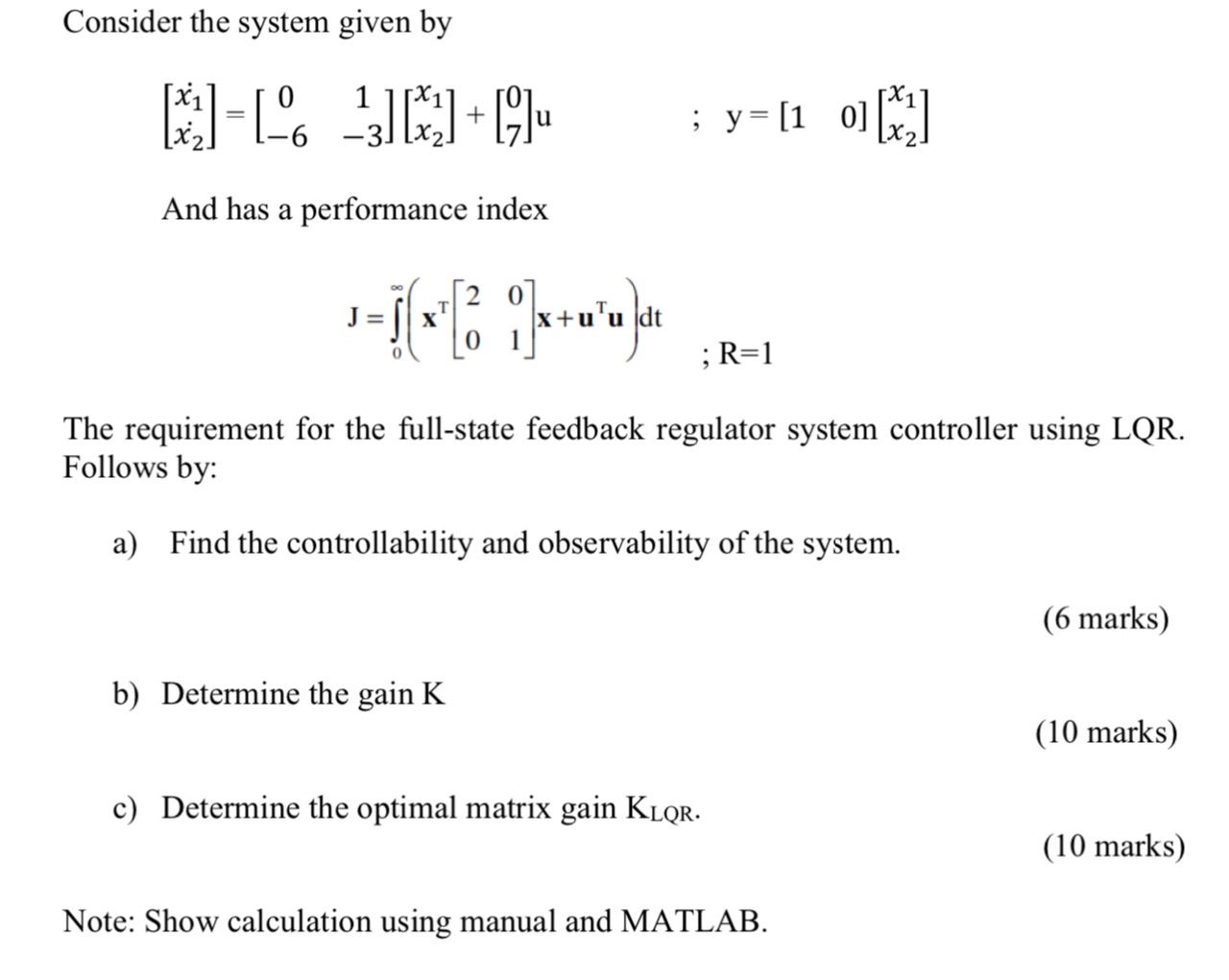
Consider the system given by
[[x_(1)^(?)],[x_(2)^(?)]]=[[0,1],[-6,-3]][[x_(1)],[x_(2)]]+[[0],[7]]u,;y=[[1,0]][[x_(1)],[x_(2)]]And has a performance index
J=\int_0^(\infty ) (x^(TT)[[2,0],[0,1]]x+u^(T)u)dt,;R=1The requirement for the full-state feedback regulator system controller using LQR. Follows by: a) Find the controllability and observability of the system. (6 marks) b) Determine the gain K c) Determine the optimal matrix gain
K_(LQR). Note: Show calculation using manual and MATLAB.help