(Solved): During ascent, the space shuttle is guided by commands generated from guidance calculations in a com ...
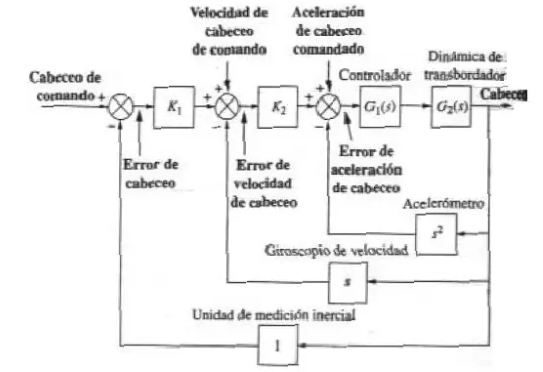
During ascent, the space shuttle is guided by commands generated from guidance calculations in a computer. These commands are based on the altitude, velocity, and acceleration of the vehicle, obtained through measurements from the vehicle’s inertial measurement unit, gyroscope speed, and accelerometer, respectively. The digital ascent autopilot uses the errors between the actual altitude, velocities, and accelerations and the commanded values to adjust the thrust vectoring of the space shuttle’s main engines and the solid rocket boosters until the vehicle reaches the desired altitude. The shuttle’s attitude control system uses the same method for pitch, roll, and yaw control. The figure shows a simplified model of the yaw control system. A) Tome k1=k2=1 , G1(s)=s+10(2) y G2(s)=1/(s+5.2(2)) Determine the closed-loop transfer function that relates the actual pitch position to the commanded pitch position. Assume all other inputs are zero.. B) Halle el error en estado estable para este sistema con las siguientes entradas (10+1)u(t), (5+1)tu(t) y 100(1+1)t^2u(t)