A factory sources microchips from three suppliers: A, B, and C. Supplier A provides \( 50 \% \) of the chips, Supplier B provides \( 30 \% \), and the rest from Supplier C. The probability a chip from supplier A is defective is 0.02 and from supplier B is 0.05 . If the probability that a defective chip is from supplier A is 0.20 ,
(a) What is the probability that a random chip is defective?
(b) Find the probability that a random chip from supplier C is defective?
Problem 9 Short answer (8 points)
In each case, show your work/code.
(a) A random variable \( X \) is binomially distributed with \( n=50 \) and \( p=0.3 \). Find the
[3] probability that \( X<10 \).
(b) A random variable \( T \) is exponentially distributed with a rate parameter of \( \lambda=20 \)
[2] occurrences/minute. What is the mean of \( T \) ?
(c) In how many ways can you have 3 successes out of 10 trials in which the outcome of
[3] each trial is either success or failure?
Part of assessing energy performance includes establishing a baseline. It also includes the selection of performance metrics, such as 'key performance indicators, KPI' or 'energy performance indicators, EPI' that properly characterizes the facility. An energy intensity is needed for each energy source, such as Btu or kWh per ______________ _______________.
Option A
base line
Option B
performance metric
Option C
weather data
Option D
unit product
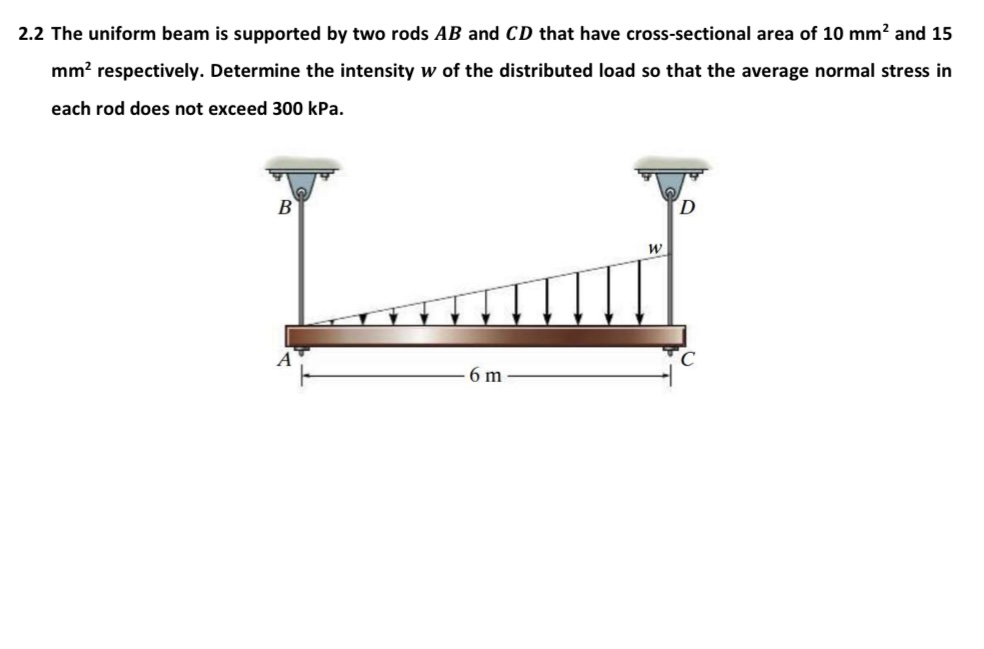
2.2 The uniform beam is supported by two rods AB and CD that have cross-sectional area of 10mm^(2) and 15 mm^(2) respectively. Determine the intensity w of the distributed load so that the average normal stress in each rod does not exceed 300 kPa clockwise is positive
Please help me with this problem. Thank you!
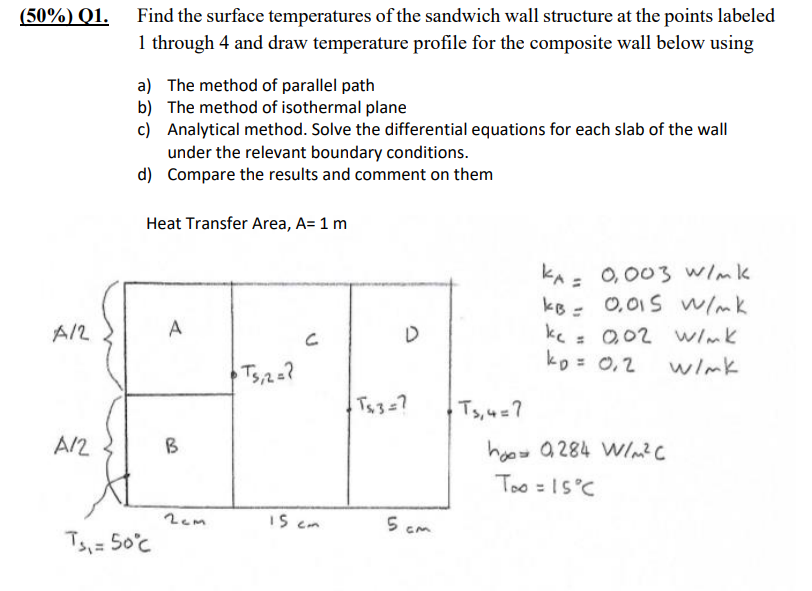
(50%)Q1.Find the surface temperatures of the sandwich wall structure at the points labeled
1 through 4 and draw temperature profile for the composite wall below using
ak_(A)=0,003(w)/(m)k
k_(B)=0,015(w)/(m)k
k_(C)=0,02(w)/(m)k
k_(D)=0,2(w)/(m)k
=
\infty =0,284(W)/(m^(2))C
\Gamma _(\infty )=15\deg C
PROBLEM STATEMENTS Design a digital controller circuit that controls the A4988 bipolar stepper motor driver module. The digital controller circuit needs to meet the following operating specifications (refer to Figure 1): Figure 1 1. When the system is first powered, the stepper motor should be in idling mode (rest mode). 2. A user can then press one out of two tactile switches to select the stepper motor’s clockwise (CW) or counter-clockwise (CCW) rotation – i.e., pressing one tactile switch sets the stepper motor to rotate in one direction, pressing the other tactile switch reverses the direction of rotation. The stepper motor must not rotate when both the tactile switches are being pressed simultaneously. 3. The A4988 motor driver module has five (5) micro-stepping modes of operation, i.e., full step; half step, quarter step; eighth step; and sixteenth step. A user can select one of these five modes of operation by pressing the ?-stepping mode tactile switch sequentially until the desired stepping mode is reached. 4. A user can select either a 50 RPM or 100 RPM of rotational speed by toggling a tactile switch. The rotational speed needs to be calibrated with the stepper motor is operated in full step mode. Additional Design Specifications 1. The digital stepper motor controller circuit should be a purely hardware-based design. 2. The +5 V and +12 V DC supplies are readily available to operate the control and actuator system.