Home /
Expert Answers /
Electrical Engineering /
problem-1-consider-the-basic-servo-loop-where-g-s-1-s-and-gc-s-kr-is-a-proportional-contr-pa168
(Solved): Problem 1. Consider the basic servo loop, where G(s)=1/s and Gc(s)=kR is a proportional contr ...
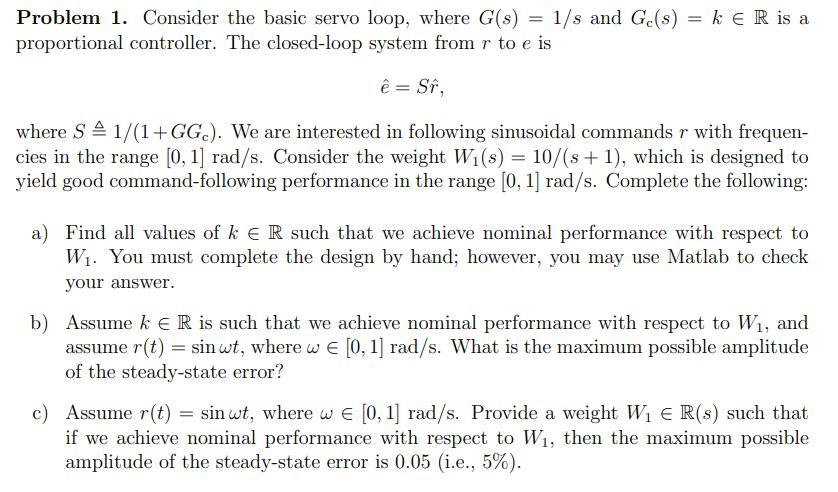
Problem 1. Consider the basic servo loop, where and is a proportional controller. The closed-loop system from to is where . We are interested in following sinusoidal commands with frequencies in the range . Consider the weight , which is designed to yield good command-following performance in the range . Complete the following: a) Find all values of such that we achieve nominal performance with respect to . You must complete the design by hand; however, you may use Matlab to check your answer. b) Assume is such that we achieve nominal performance with respect to , and assume , where . What is the maximum possible amplitude of the steady-state error? c) Assume , where . Provide a weight such that if we achieve nominal performance with respect to , then the maximum possible amplitude of the steady-state error is 0.05 (i.e., ).