Home /
Expert Answers /
Electrical Engineering /
problem-5-consider-the-basic-servo-loop-with-multiplicative-uncertainty-where-the-nominal-plant-i-pa491
(Solved): Problem 5. Consider the basic servo loop with multiplicative uncertainty, where the nominal plant i ...
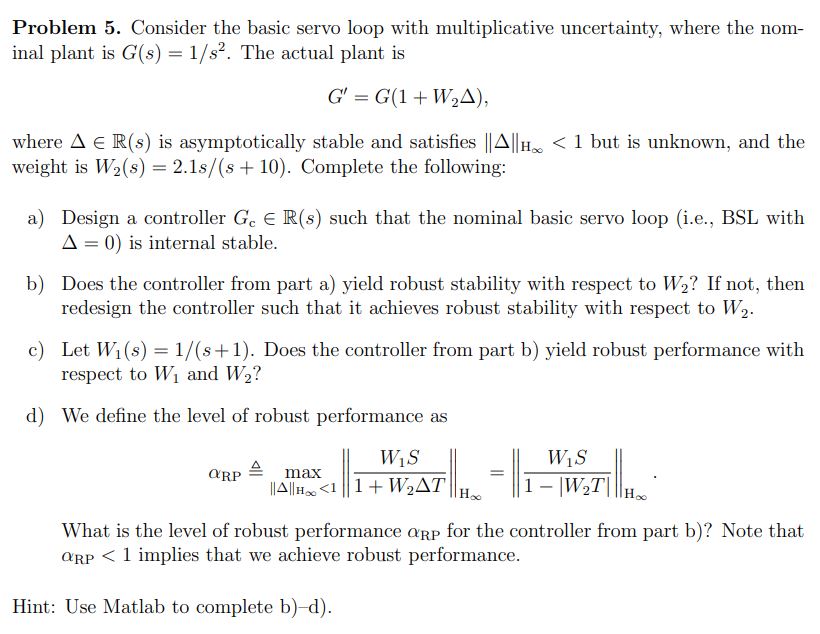
Problem 5. Consider the basic servo loop with multiplicative uncertainty, where the nominal plant is . The actual plant is where is asymptotically stable and satisfies but is unknown, and the weight is . Complete the following: a) Design a controller such that the nominal basic servo loop (i.e., BSL with is internal stable. b) Does the controller from part a) yield robust stability with respect to ? If not, then redesign the controller such that it achieves robust stability with respect to . c) Let . Does the controller from part b) yield robust performance with respect to and ? d) We define the level of robust performance as What is the level of robust performance for the controller from part b)? Note that implies that we achieve robust performance. Hint: Use Matlab to complete b)-d).