(Solved): Problematic: Suppose we have a simple mass-spring-damper system as shown in the figure below. The sy ...
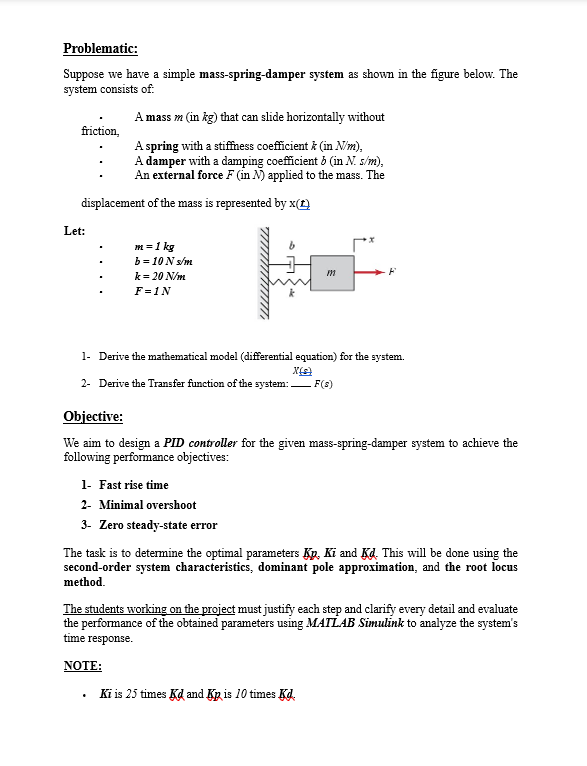
Problematic: Suppose we have a simple mass-spring-damper system as shown in the figure below. The system consists of: - A mass \( m \) (in kg ) that can slide horizontally without friction, - A spring with a stiffness coefficient \( k \) (in \( \mathrm{N} / \mathrm{m} \) ), - A damper with a damping coefficient \( b \) (in \( N \mathrm{~s} / \mathrm{m} \) ), - An external force \( F(\operatorname{in} N) \) applied to the mass. The displacement of the mass is represented by \( x(\underline{t}) \) Let: - \( \quad m=1 \mathrm{~kg} \) - \( b=10 \mathrm{~N} \mathrm{~s} / \mathrm{m} \) - \( k=20 \mathrm{~N} / \mathrm{m} \) - \( F=1 N \) 1- Derive the mathematical model (differential equation) for the system. \[ X(s) \] 2- Derive the Transfer function of the system: \( F(s) \) Objective: We aim to design a PID controller for the given mass-spring-damper system to achieve the following performance objectives: 1- Fast rise time 2- Minimal overshoot 3- Zero steady-state error The task is to determine the optimal parameters \( \mathrm{Kp}, \mathrm{Ki} \) and Kd . This will be done using the second-order system characteristics, dominant pole approximation, and the root locus method. The students working on the project must justify each step and clarify every detail and evaluate the performance of the obtained parameters using MATLAB Simulink to analyze the system's time response. NOTE: - \( K i \) is 25 times \( K d \) and \( K p \) is 10 times \( K d \).