Home /
Expert Answers /
Electrical Engineering /
the-torque-balance-equation-is-t-m-t-j-d-omega-t-dt-b-omega-t-where-t-m-the-motor-tor-pa875
(Solved): The torque balance equation is: ,T_(M)(t)=J(d\omega (t))/(dt)+B\omega (t), where T_(M) the motor tor ...
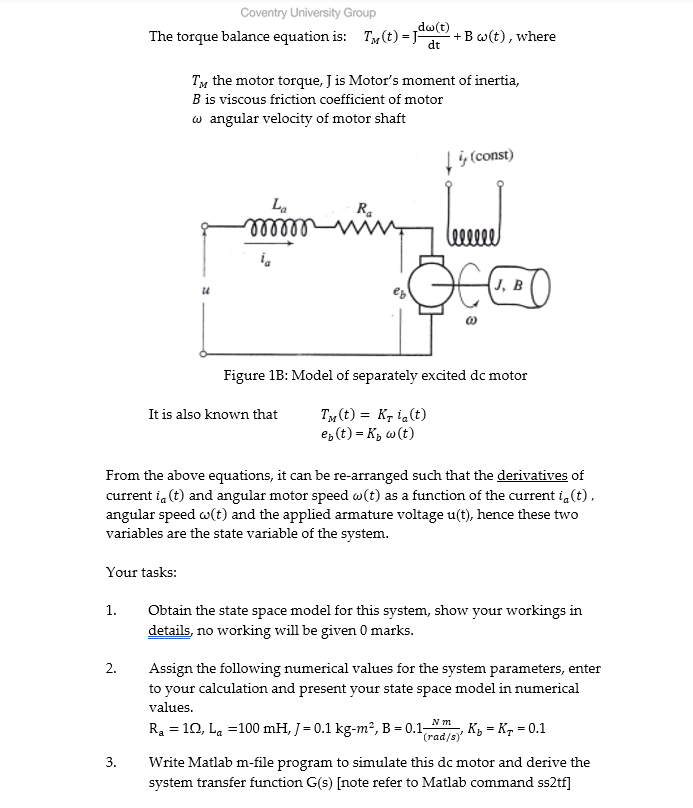
The torque balance equation is: ,T_(M)(t)=J(d\omega (t))/(dt)+B\omega (t), where
T_(M) the motor torque, J is Motor's moment of inertia,
B is viscous friction coefficient of motor
\omega angular velocity of motor shaft
Figure 1B: Model of separately excited dc motor
It is also known that
T_(M)(t)=K_(T)i_(a)(t)
e_(b)(t)=K_(b)\omega (t)
From the above equations, it can be re-arranged such that the derivatives of
current i_(a)(t) and angular motor speed \omega (t) as a function of the current i_(a)(t),
angular speed \omega (t) and the applied armature voltage u(t), hence these two
variables are the state variable of the system.
Your tasks:
Obtain the state space model for this system, show your workings in
details, no working will be given 0 marks.
Assign the following numerical values for the system parameters, enter
to your calculation and present your state space model in numerical
values.
R_(a)=1\Omega ,L_(a)=100mH,J=0.1kg-m^(2),B=0.1(Nm)/((ra(d)/(s))^(')),K_(b)=K_(T)=0.1
Write Matlab m -file program to simulate this dc motor and derive the
system transfer function G(s) [note refer to Matlab command ss2tf]