Home /
Expert Answers /
Mechanical Engineering /
what-is-the-diffreneces-between-control-can-and-observable-can-know-we-take-the-transpose-of-t-pa822
(Solved): what is the diffreneces between control can. and observable can. ? know we take the transpose of t ...
what is the diffreneces between control can. and observable can. ?

? know we take the transpose of the matrix but why y is changed?
State-space and Transfer Function Representations Transfer Functions to State-Space Observable Canonical Form \[ \begin{array}{l} \dot{x}=\left[\begin{array}{ccccc} 0 & 0 & \cdots & 0 & -a_{0} I_{p} \\ I_{p} & 0 & \cdots & 0 & -a_{1} I_{p} \\ 0 & I_{p} & \cdots & 0 & -a_{2} I_{p} \\ \vdots & \vdots & \ddots & \vdots & \vdots \\ 0 & 0 & \cdots & I_{p} & -a_{n-1} I_{p} \end{array}\right] x+\left[\begin{array}{c} N_{0} \\ N_{1} \\ N_{2} \\ \vdots \\ N_{n-1} \end{array}\right] u \\ y=\left[\begin{array}{ccccc} 0 & 4 & \cdots & 0 & I_{p} \end{array}\right] x \end{array} \]
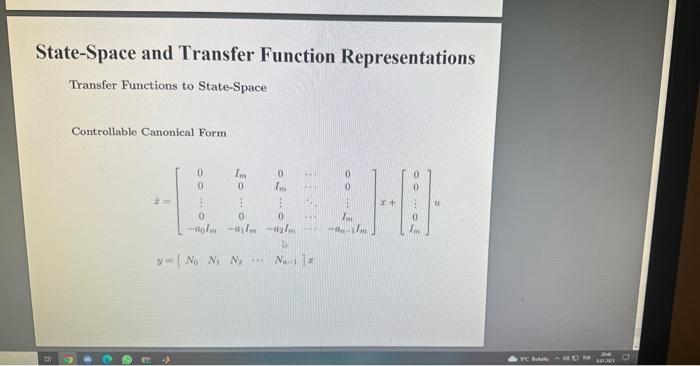
State-Space and Transfer Function Representations Transfer Functions to State-Space Controllable Canonical Form \[ \begin{array}{l} \vec{z}=\left[\begin{array}{ccccc} 0 & I_{m} & 0 & \cdots & 0 \\ 0 & 0 & I_{m} & 0 \\ \vdots & \vdots & \vdots & \vdots & \vdots \\ 0 & 0 & 0 & I_{m} \\ -a_{0} I_{m} & -a_{1} I_{m} & -a_{2} I_{m} & -a_{n-I_{m}} \end{array}\right] x+\left[\begin{array}{c} 0 \\ 0 \\ \vdots \\ 0 \\ I_{m} \end{array}\right] u \\ y=\left[\begin{array}{lllll} N_{0} & N_{i} & N_{2} & \ldots & N_{n-1} \end{array}\right] x \\ \end{array} \]
Expert Answer
The controllable canonical form and the observable canonical form are two diff