Home /
Expert Answers /
Mechanical Engineering /
what-is-the-vector-loop-equation-around-this-5-bar-linkage-all-joints-are-rotary-and-the-coordinat-pa628
(Solved): What is the vector loop equation around this 5 bar linkage?, all joints are rotary and the coordinat ...
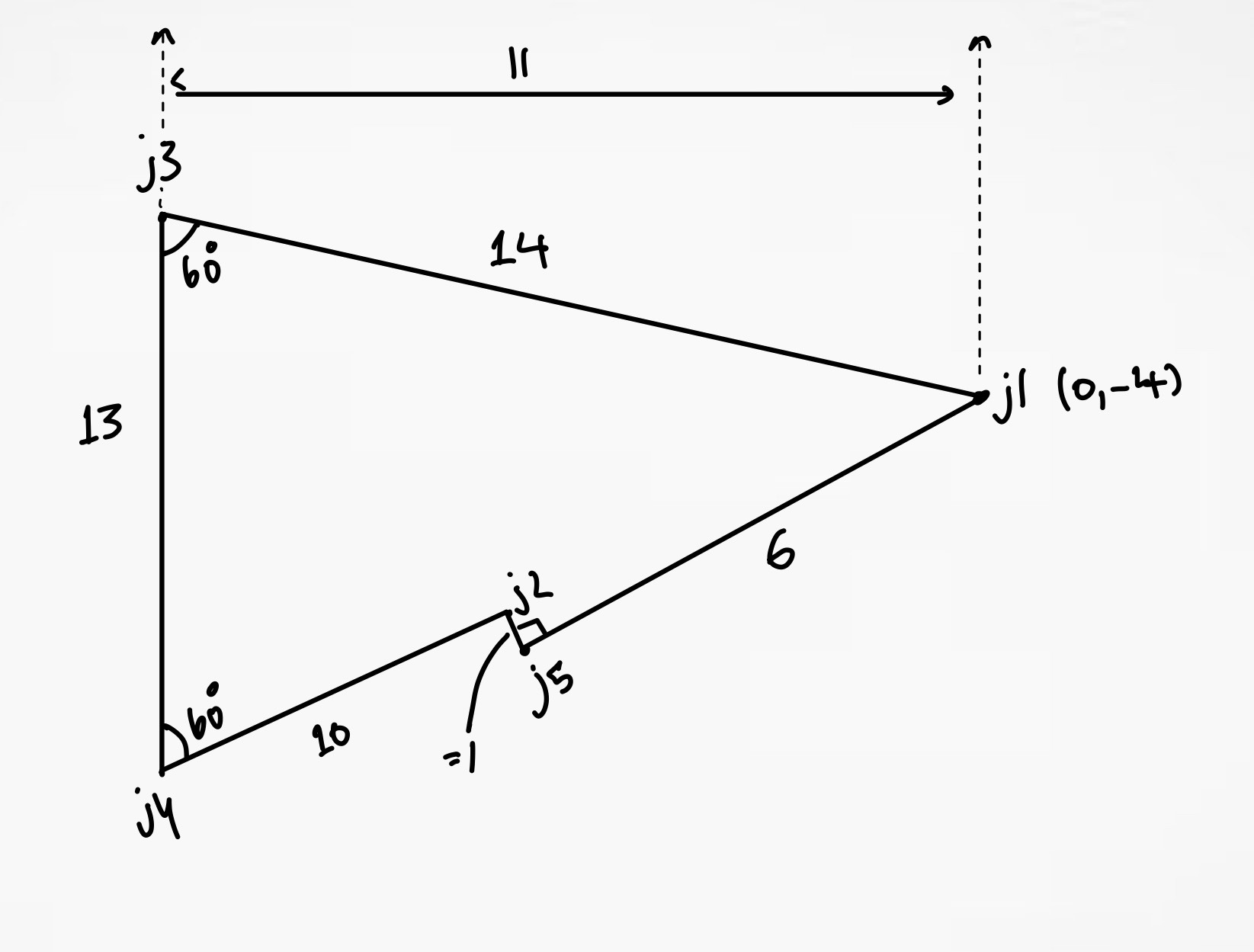
What is the vector loop equation around this 5 bar linkage?, all joints are rotary and the coordinates of joint (J1) is shown, please provide the closure equations in a way they can be broken down into two scalar components (x,y), use sin and cos for angles, please. ( This is part of the strider linkage mechanism, it is the bottom left leg)